屑俺日記
僕の備忘録(PC、UN*X、ネットワーク関連が中心)なんです。
自分の書いたところは適当(な時とか)に書き換えますので御了承を。
2021-08-13(Fri) 日付が変わる前にいきなり
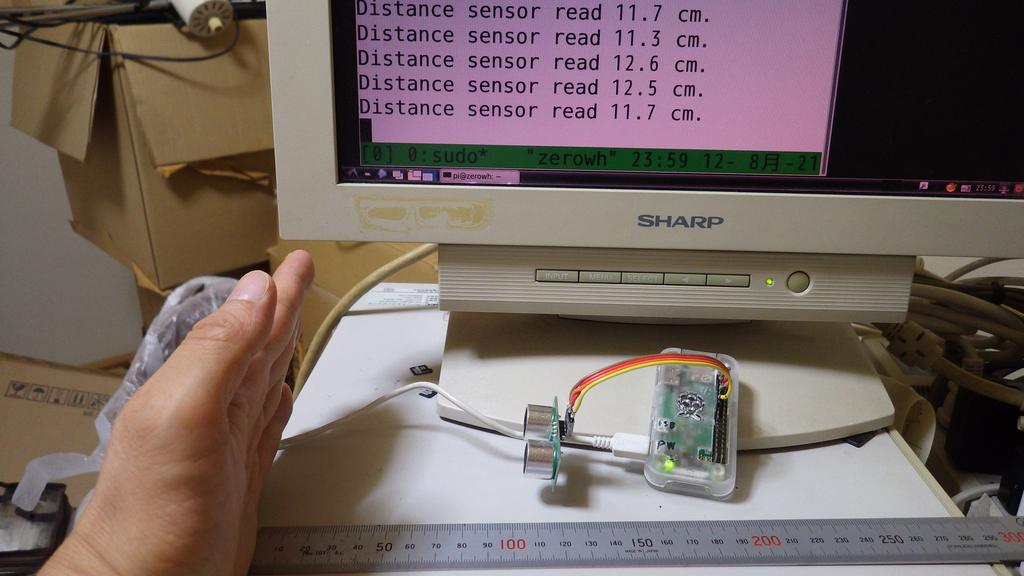
☆ これも放置していた超音波距離センサー

てけとうに検索して、 参考にしたページ。
例によって
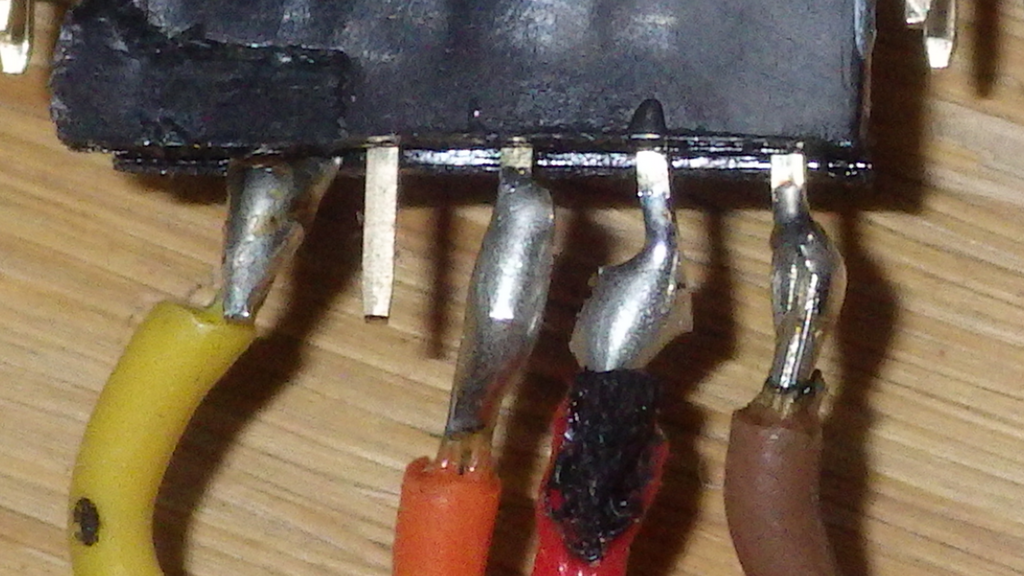
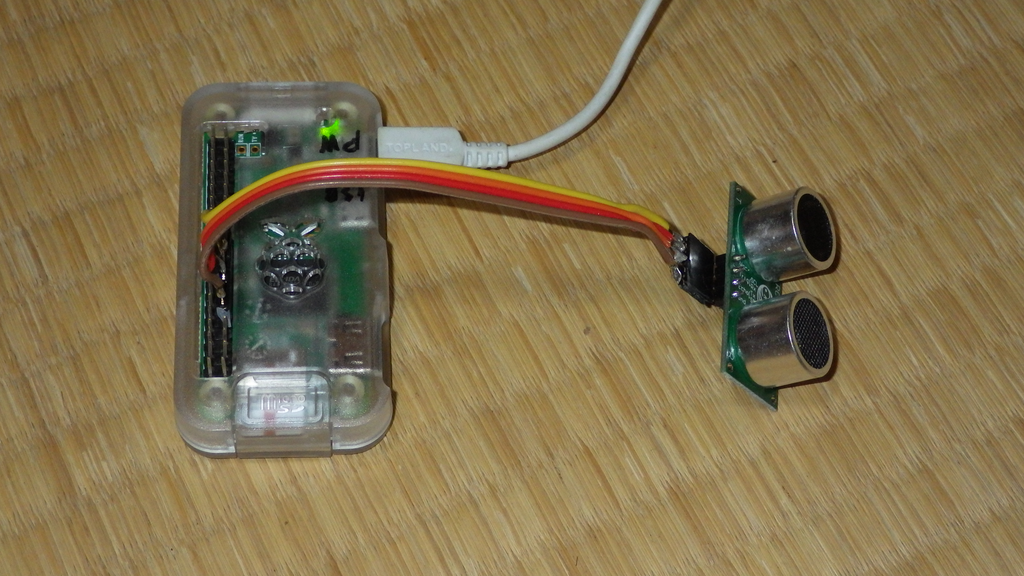
汚くZeroに
繋ぐ。配線があっちこっちに飛ぶのが面倒なので
GPIOは適当に変えた。
面倒なので配線の色もありあわせで。
{kind=link}
{kind=link}
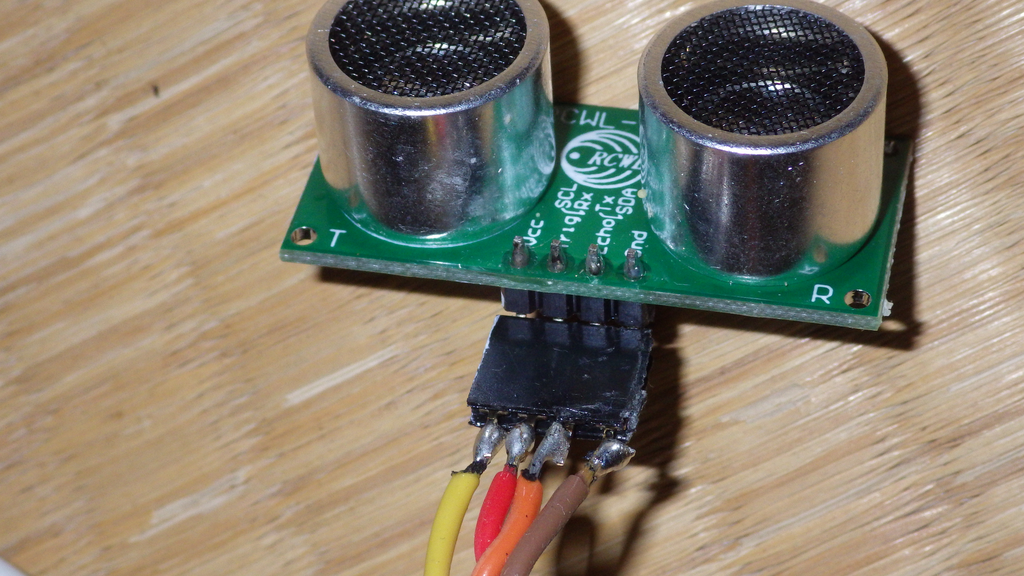
RaspberryPi Zero adafruit 4007 GND (Physical pin 9) -----(Brown)-------- GND GPIO BCM 17(Physical pin 11) -----(Red)---------- Trig GPIO BCM 27(Physical pin 13) -----(Tangerine)---- ECHO 3.3V (Physical Pin 15) -----(Yellow)------- VCC
{kind=link}
{kind=link}
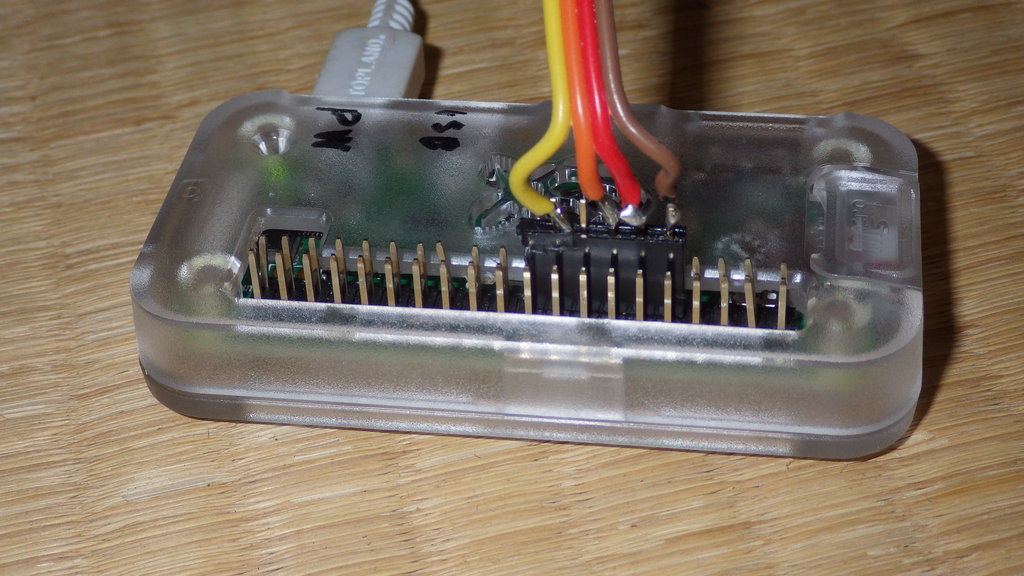
GPIO Pinの方向(ピンの物理番号の若い方はMicroSD側)を間違えて
刺してしまったことに、通電してから気づく。
幸い、壊れるような電流は流れなかったらしい。
手をかざして、サンプルソースを実行。
{kind=link}
$ sudo python3 ultrasonic_distance.py /usr/lib/python3/dist-packages/gpiozero/input_devices.py:856: PWMSoftwareFallback: For more accurate readings, use the pigpio pin factory.See https://gpiozero.readthedocs.io/en/stable/api_input.html#distancesensor-hc-sr04 for more info 'For more accurate readings, use the pigpio pin factory.' Press CTRL-C to exit. Distance sensor read 17.6 cm. Distance sensor read 18.0 cm. Distance sensor read 31.0 cm.(遠ざけた) Distance sensor read 30.7 cm. Distance sensor read 10.5 cm.(近づけた) Distance sensor read 10.2 cm. ^CTraceback (most recent call last): File "ultrasonic_distance.py", line 8, insleep(1) KeyboardInterrupt
エラーメッセージが気になるが、ともかく動いたと。
[ツッコミを入れる]
リンクはご自由にどうぞ。でもURLや内容が変った場合はあしからず。